硕士生导师简介

王坤阳,博士研究生导师,1990年出生,博士毕业于英国曼彻斯特大学,国家高层次留学人才,全国创新创业优秀博士后、吉林大学“唐敖庆学者”,2019年入选 “博士后国际交流计划引进项目”后在吉林大学从事博士后研究,现任吉林大学教授、中国科学院任露泉院士助理、“机械系统仿生理论与技术基础”国家自然科学基金创新研究群体骨干成员。
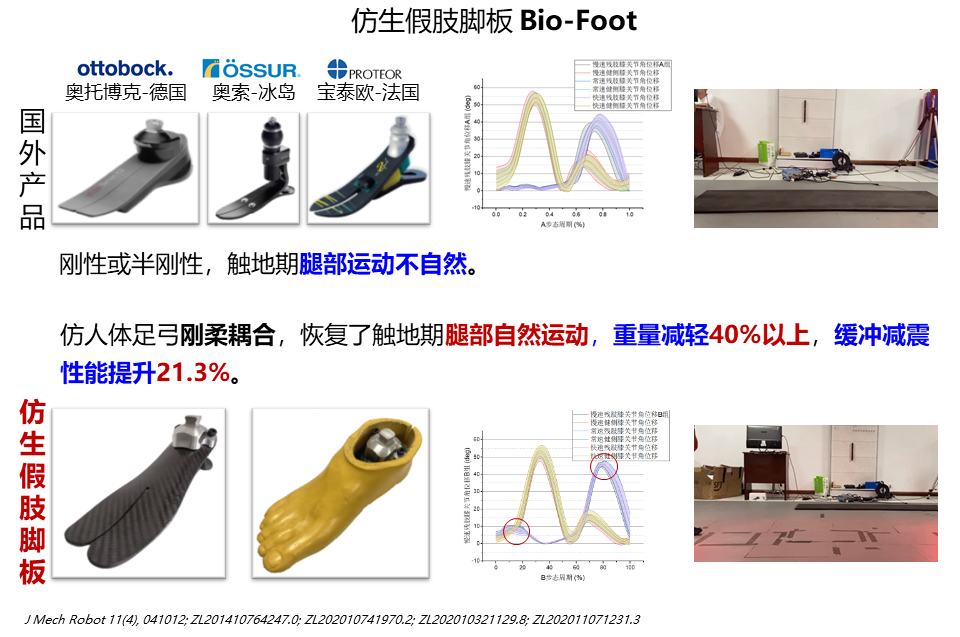
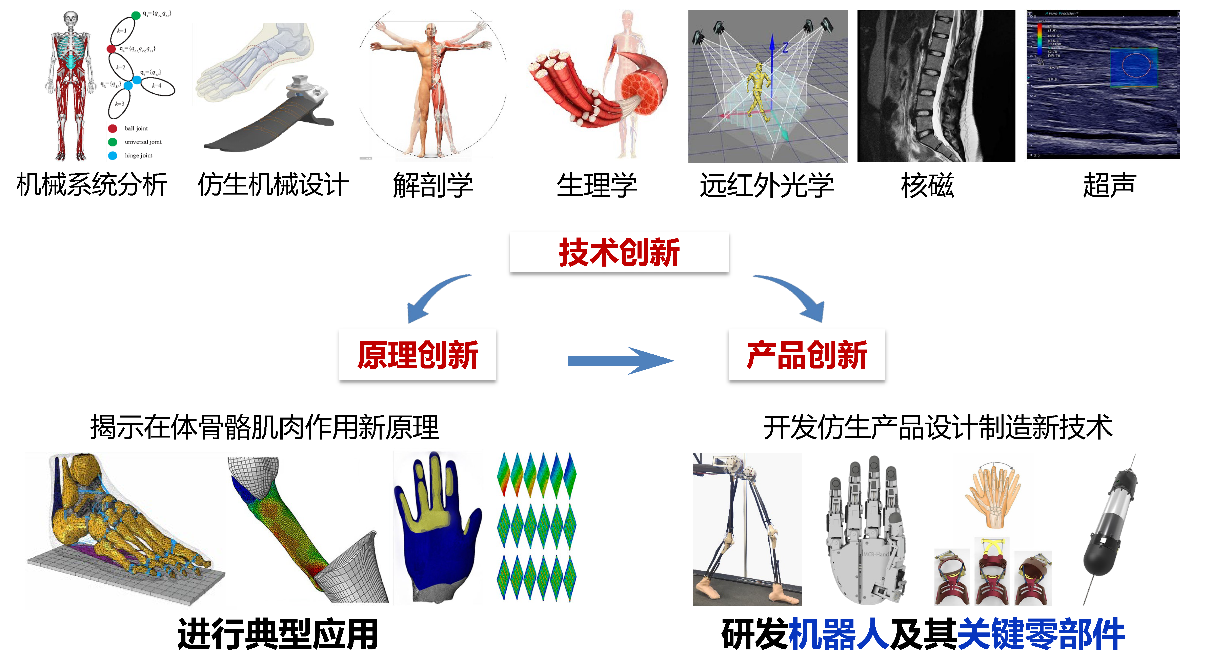
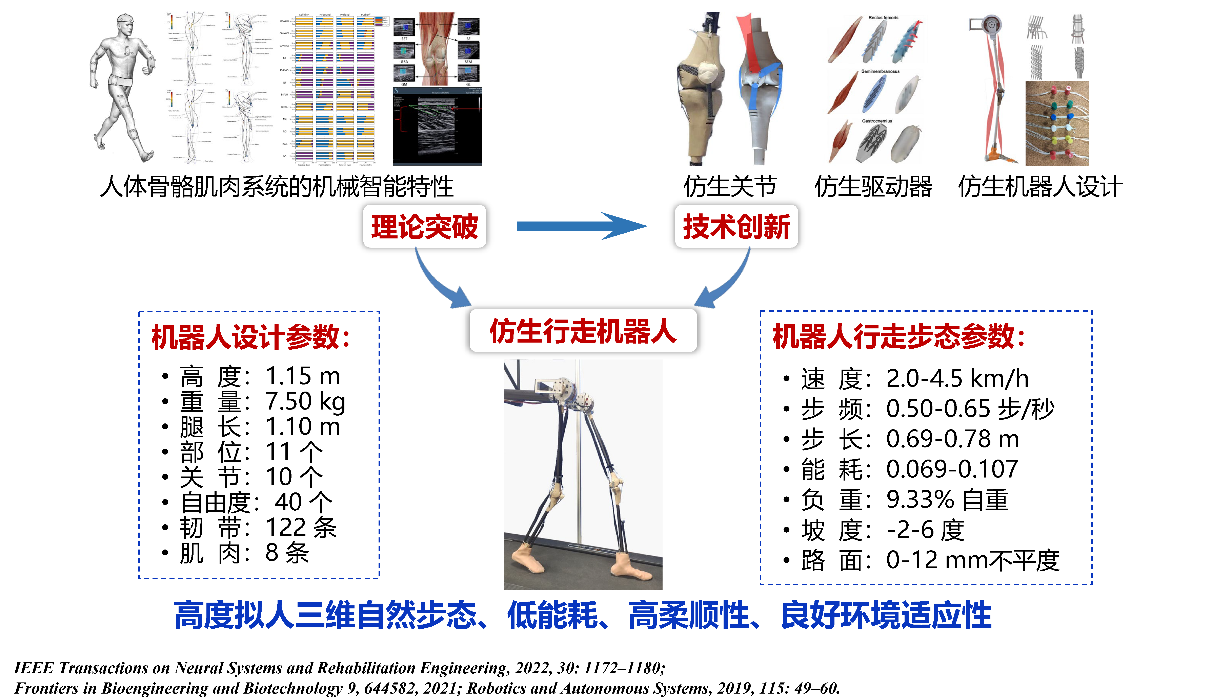
长期从事人体科学、仿生机器人和高端装备等领域研究,将机械系统分析、仿生机械设计、解剖学、生理学及生物光学、核磁、超声等测试技术有机融合,开发了多学科集成骨骼肌肉健康在体精准分析技术,实现了复杂三维运动下骨骼肌肉组织在体运动和力学状态的精准解析;揭示了人体骨骼肌肉系统和双足行走的机械智能特性,提出了具备机械智能的刚柔耦合仿生双足机器人设计原理,研制了系列具备机械智能特性的仿生机器人系统,解决了机器人能耗高、运动自然性差和环境适应性差的问题;揭示了在体生理运动下足踝生物力学原理和统一运动规律,发明了足踝仿生设计制造技术,研制了刚柔耦合仿生假肢脚板和双运动自由度假肢踝关节,解决了下肢假肢穿戴舒适性和运动自然性差的难点问题。研究成果在山东威高骨科材料股份有限公司、大博医疗科技股份有限公司、德林义肢康复器材(上海)有限公司和德林义肢矫型器(北京)有限公司长春分公司等单位得到应用,大幅降低了仿生假肢踝关节、仿生假肢脚板、仿生椎间融合器和仿生桥式接骨板系统等产品的研发成本,新增产值数亿元,产生了显著的经济和社会效益,推动了机器人、康复器械、生物医学、仿生 健康等领域的关键技术突破和产学研用合作创新水平,对于推进健康中国建设、增进人民福祉具有重大经济和社会意义。
作为负责人主持国家和省部级以上课题12项(合同经费1300余万元),其中自然基金课题2项,作为研究骨干参加国自然创新研究群体项目、国自然重大研究计划重点项目和科技部重点研发计划等国家重大课题3项。近五年以第一/通讯作者身份发表SCI论文26篇,授权欧盟和英国发明专利5件、国家发明专利29件,入选2021年“第五批吉林省青年科技人才托举工程”,获2022年教育部技术发明一等奖、2021年吉林省技术发明一等奖、2023年第二届全国博士后创新创业大赛优胜奖、2017年首届国际仿生创新大赛二等奖、2019年国际仿生工程大会最佳报告奖、2021年CRME第十届国际康复医学与工程大会“产学研医用”创新大赛一等奖等。
招生信息
围绕机器人世界科技前沿、国家重大需求和人民生命健康,依托国家重大科研项目,长期招收仿生、机械、机器人、机电一体化、执行器、康复辅具等方向硕士/博士研究生。
联系方式
手机:18697753752
邮箱:kywang@jlu.edu.cn
微信:897372184
科研项目
1. 国家自然科学基金委,青年科学基金项目,具备智能机械特性的仿生柔性足踝关键技术,2021-01至2023-12,24万元,在研,主持
2. 国家自然科学基金委,重大研究计划集成项目子课题,91948302,面向肢体运动功能重建的生机电一体化机器人技术,2020-01至2024-12,90万元,在研,主持
3. 机器人一体化平衡控制研究,2024-10至2026-04,95万元,在研,主持
4. 数字孪生技术,2022-12至2025-12,500万元,在研,主持
5. 仿生智能变体技术,2022-01至2025-12,150万元,在研,主持
6. 中国博士后科学基金会,特别资助(站中)项目,2021T140260,具备机械智能的柔性仿生双足机器人关键技术,2021-06至2021-09,18万,结题,主持
7. 国家人力资源和社会保障部,博士后国际交流计划引进项目,YJ20190153,仿生拉压体双足机器人原理与关键技术,2019-12至2021-12,60万元,结题,主持
8. 中国博士后科学基金会,面上资助项目,2021M691206,基于自适应变刚度的柔性仿生膝关节机器人研究,2021-06至2021-09,8万,结题,主持
9. 吉林省科学技术协会,第五批吉林省青年科技人才托举工程,QT202107,2021-04至2023-12,10万元,在研,主持
10. 吉林省科学技术厅,自然科学基金 (学科布局项目),20210101053JC,基于自适应变刚度的机器人柔性仿生膝关节关键技术,2021-07至2024-06,14万元,在研,主持
11. 浙江国丰集团,横向项目,2020220002000279,施工用外骨骼助力机器人开发,2020-09至2022-12,120万元,在研,主持
12. 国家自然科学基金委,创新研究群体项目,52021003,机械系统仿生理论与技术基础,2021-01至2025-12,1000万元,在研,骨干
13. 科技部,国家重点研发计划重点专项,2020YFB1711502,数字孪生与数据挖掘驱动的生产智能优化关键技术研究,2020-07至2022-12,218万元,在研,骨干
14. 科技部,国家重点研发计划重点专项,2018YFC2001300,膝踝一体化仿生智能下肢假肢关键技术与应用研究,2019-01至2022-12,1111万元,在研,骨干
15. 国家自然科学基金委,重大研究计划重点项目,91848204,仿生拉压体双足机器人原理与关键技术,2019-01至2022-12,280万元,在研,骨干
16. 国家自然科学基金委,面上项目,51675222,基于生物张拉原理的节能步行腿仿生关键技术,2017-01至 2020-12,62万元,在研,骨干
17. 国家自然科学基金委,面上项目,51475202,高效节能仿生步行腿的生物力学原理与关键技术,2015-01至 2018-12,83万元,结题,骨干
奖励与荣誉
1. 2024年吉林大学仿生科学与工程学院本科毕业生“我最喜爱的教师”,2024.06.17
2. 2023年国家高层次留学人才,2023.10
3. 2023年第三批“全国高校黄大年式教师团队”,2023.08
4. 2023年吉林大学“唐敖庆学者”,2023.10.10
5. 2022年教育部技术发明一等奖,2023.06.06
6. 2021年吉林省技术发明一等奖,2021.11.12
7. 2021年CRME国际康复医学与工程大会“产学研医用”创新大赛一等奖
8. 2021年第五批吉林省青年科技人才托举工程
9. 2021年吉林大学年励新优秀青年教师培养计划 (重点培养阶段)
10. 2021年吉林大学优秀博士后
11. 2019年国际仿生工程大会最佳报告奖
12. 2017年国际仿生创新大赛二等奖
社会任职
1. 国际仿生工程学会ISBE青年委员会 副主任委员
2. 仿生领域顶级期刊Journal of Bionic Engineering 领域副主编
3. 机器人顶级会议ICRA 2024 领域副主编
4. 国际仿生工程学会 会员
5. ASME美国机械工程师协会 会员
6. IEEE电气电子工程师学会 会员
7. 中国机械工程学会 高级会员
8. 中国自动化学会 会员
9. 中国人工智能学会 会员
10. 吉林省机器人学会 会员
11. 第15届智能机器人与应用国际会议The 15th International Conference on Intelligent Robotics and Applications (ICIRA 2022), Bio-inspired Healthcare Robotics and Technology 分会场主席
12. 2021年国际仿生工程研讨会 (IWBE 2021) 暨第四届仿生机器人与健康工程国际研讨会, 分会场主席
部分代表性论文
1. Shun Zhao, Wei Liang, Kunyang Wang*, Lei Ren*, Zhihui Qian, Xuewei Lu, Di Zhao, Xu Wang, Luquan Ren; A Multiaxial Bionic Ankle Based on Series Elastic Actuation with a Parallel Spring, IEEE Transactions on Industrial Electronics, 2024, 71(7): 7498–7510. (JCR Q1, 吉林大学C刊, 中科院1区, 2023 IF 7.7)
2. Di Zhao, Xinbo Wang, Lei Ren*, Kunyang Wang*, Luquan Ren; Coaxial Integrated Tendon-Driven Actuator: Design, Modeling, Control, and Performance Analysis, IEEE Robotics and Automation Letters, 2024, 9(11): 10692–10699. (JCR Q1, 中科院2区Top, 2024 IF 4.6)
3. Xuewei Lu, Shun Zhao, Wei Chen, Hong Xie, Junnan Teng, Lei Ren*, Kunyang Wang*, Zhihui Qian, Luquan Ren; Bioinspired multilayer braided structure with controllable nonlinear mechanical properties used for artificial ligaments, Materials & Design, 2024, 241: 112976. (JCR Q1, 前一年中科院1区, 2023 IF 8.4)
4. Kunyang Wang, Amaraporn Boonpratatong, Wei Chen, Lei Ren*, Guowu Wei, Zhihui Qian, Xuewei Lu*, Di Zhao; The fundamental property of human leg during walking: linearity and nonlinearity, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2023, 31: 4871–4881. Published online 2023.12.05. (JCR Q1, 中科院1区, 2023 IF 4.9)
5. Kunyang Wang, Lei Ren*, Richard Jones, Chris Nester, David Howard, Guowu Wei, Zhihui Qian, Xuewei Lu*, Di Zhao, Luquan Ren; Preliminary study of 3-D Dynamic Interactions Between Backpack and Bearer for Health Monitoring Using a Multiple Sensor Method, IEEE Sensors Journal, 2023, 23(24): 31098–31107. Published online 2023.12.15. (JCR Q1, 中科院2区 Top, 2023 IF 4.3)
6. Kunyang Wang, Harry Willianms, Zhihui Qian, Guowu Wei, Haohua Xiu, Wei Chen, Xuewei Lu, Jianqiao Jin, Lei Ren*, Wei Liang*, Luquan Ren; Design and Evaluation of a Smooth-Locking-Based Customizable Prosthetic Knee Joint, Journal of Mechanisms and Robotics-Transactions of the ASME, 2024, 16(4): 041008. (JCR Q2, 中科院3区, 2023 IF 2.6)
7. Zheqi Hu, Lei Ren*, Guowu Wei, Zhihui Qian, Wei Liang, Wei Chen, Xuewei Lu, Kunyang Wang*, Luquan Ren; Energy flow and functional behaviour of individual muscles at different speeds during human walking, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2023, 31, 294–303. (JCR Q1, 中科院1区, 2023 IF 4.9)
8. Liang, Wei; Wu, Wei; Chen, Wei; Ren, Lei*; Wang, Kunyang*; Qian, Zhihui*; Ren, Luquan; A Novel Bioinspired Robotic Knee with Controlled Joint Surfaces and Adjustable Ligaments, Bioinspiration & Biomimetics, 2022, 17: 066006. (JCR Q2, 中科院2区, 2022 IF 2.985)
9. Liang, Wei; Qian, Zhihui; Chen, Wei; Song, Hounan; Cao, Yu; Wei, Guowu; Ren, Lei*; Wang, Kunyang*; Ren, Luquan; Mechanisms and mechanical design of prosthetic knees: a review from a three-functional-axes perspective, Frontiers in Bioengineering and Biotechnology, 2022, 10: 950110. (JCR Q1, 中科院2区, 2022 IF 6.064)
10. Jianqiao Jin, Kunyang Wang*, Lei Ren*, Zhihui Qian, Wei Liang, Xiaohan Xu, Shun Zhao, Xuewei Lu, Di Zhao, Xu Wang, Luquan Ren; Design of a flexible bionic ankle prosthesis based on subject-specific modeling of the human musculoskeletal system, Journal of Bionic Engineering, 2023, 20: 1008–1020. (JCR Q2, 中科院2区, 2023 IF 4.0)
11. Liu, Jing; Mustafa, Al-Khazraji; Lees, Vivien C.; Qian, Zhihui; Wei, Guowu; Lu, Xuewei; Jin, Jianqiao; Ren, Lei*; Wang, Kunyang*; Ren Luquan; Analysis and validation of a 3D FE model for human forearm complex under various loading conditions, International Journal for Numerical Methods in Biomedical Engineering, 2022, e3617. (JCR Q2, 中科院2区, 2022 IF 2.648)
12. Lu, Xuewei; Ren, Lei*; Wang, Kunyang*; Wei, Guowu; Qian, Zhihui; Ren, Luquan; Reproduction of the Mechanical Behavior of Ligament and Tendon for Artificial Joint Using Bioinspired 3D Braided Fibers, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022, 30: 1172–1180. (JCR Q1, 中科院1区, 2022 IF 4.528)
13. Hu, Zheqi; Ren, Lei*; Hu, Dan; Gao, Yilei; Wei, Guowu; Qian, Zhihui; Wang, Kunyang*; Speed-Related Energy Flow and Joint Function Change During Human Walking, Frontiers in Bioengineering and Biotechnology, 2021, 9: 666428. (JCR Q1, 中科院2区, 2022 IF 6.064)
14. Wang, Kunyang; Raychoudhury, Sivangi; Hu, Dan; Ren, Lei*; Liu, Jing; Xiu, Haohua; Liang, Wei; Li, Bingqian; Wei, Guowu; Qian, Zhihui*; The impact of locomotor speed on the human metatarsophalangeal joint kinematics, Frontiers in Bioengineering and Biotechnology, 2021, 9: 644582. (JCR Q1, 中科院2区, 2022 IF 6.064)
15. Wang, Kunyang; Ren, Lei*; Qian, Zhihui*; Liu, Jing; Geng, Tao; Ren, Luquan; Development of a 3D Printed Bipedal Robot: Towards Humanoid Research Platform to Study Human Musculoskeletal Biomechanics, Journal of Bionic Engineering, 2021, 18: 150–170. (JCR Q2, 中科院2区, 2022 IF 2.995)
16. Wang, Kunyang#; Hosseinnejad, Soroosh Haji#; Jabran, Ali; Baltzopoulos, Vasilios; Ren, Lei*; Qian, Zhihui*; A biomechanical analysis of 3D stress and strain patterns in patellar tendon during knee flexion, International Journal for Numerical Methods in Biomedical Engineering, 2020, 36(9): e3379. (JCR Q2, 中科院2区, 2022 IF 2.648)
17. Wang, Kunyang#; Tobajas, Pablo Tena#; Liu, Jing; Geng, Tao; Qian, Zhihui*; Ren, Lei*; Towards a 3D passive dynamic walker to study ankle and toe functions during walking motion, Robotics and Autonomous Systems, 2019, 115: 49–60. (JCR Q2, 中科院3区, 2022 IF 3.700)
部分授权专利
1. 王坤阳, 任雷, 钱志辉, 梁威, 卢雪薇, 曾懿, 任露泉; Small-size multi-axis prosthetic ankle, GB2212192.5, 授权公告日: 2023.12.04 (英国专利)
2. 王坤阳, 任雷, 钱志辉, 梁威, 薛益峰, 卢雪薇, 修豪华, 任露泉; Split transverse arch prosthetic foot, GB2208801.7, 授权公告日: 2023.10.11 (英国专利)
3. 任雷, 王坤阳, 曾懿, 钱志辉, 修豪华, 梁威, 任露泉; A bioinspired multi-axial ankle prosthesis enabling adjustable joint orientations based on fixed axis length, EP3954340,授权公告日: 2022.09.28 (欧盟专利)
4. 任雷, 王坤阳, 曾懿, 钱志辉, 修豪华, 梁威, 任露泉; Multi-axis ankle joint prosthesis, EP21163798.8, 授权公告日: 2023.09.06 (欧盟专利)
5. 王坤阳,温佳成,任雷,曹泳靖,卢雪薇,高敏,谢红,任露泉;一种仿生韧带的应力强化装置,申请日: 2024.06.06,公告号:CN118306040B,专利号:ZL202410726778.4,授权公告日:2024.08.13
6. 王坤阳,赵顺,任雷,钱志辉,梁威,卢雪薇,赵迪,王旭,任露泉;一种主动式两自由度的仿生足装置,申请日: 2022.10.10,公告号:CN115464631B,专利号:ZL202211236383.3,授权公告日:2024.09.27
7. 王坤阳,任雷,梁威,李冰倩,钱志辉,卢雪薇,赵迪,任露泉;一种仿生下肢机构,申请日: 2022.06.17,公告号:CN114869551B,专利号:ZL202210683988.0,授权公告日:2024.07.12
8. 王坤阳,温佳成,任雷,卢雪薇,陈魏,王旭,徐箫寒,任露泉;一种气动平衡与重心主动调节的下肢仿生假肢,申请日:2024.03.04,公告号:CN117814969B,专利号:ZL202410239768.8,授权公告日:2024.06.07
9. 王坤阳,梁威,任雷,李冰倩,钱志辉,卢雪薇,赵迪,任露泉;一种仿生护膝支具,申请日: 2022.07.19,公告号:CN115192286B,专利号:ZL202210850205.3,授权公告日:2024.05.28
10. 王坤阳,温佳成,任雷,卢雪薇,谢红,滕俊男,任露泉;一种全自动仿生韧带编织机,申请日:2024.01.05,公告号:CN117512857B,专利号:ZL202410016706.0,授权公告日:2024.03.26
11. 王坤阳, 曾懿, 任雷, 钱志辉, 卢雪薇, 梁威, 任露泉; 一种小体积多轴踝关节假肢, ZL202110992322.9, 授权公告日: 2022.08.30
12. 王坤阳, 曾懿, 任雷, 钱志辉, 卢雪薇, 修豪华, 梁威, 任露泉; 一种多轴踝关节假肢, ZL202110503565.1, 授权公告日: 2022.05.20
13. 王坤阳, 薛益峰, 任雷, 钱志辉, 卢雪薇, 梁威, 修豪华, 任露泉; 一种分离式横弓假肢脚板, ZL202110667789.6, 授权公告日: 2022.03.29
14. 王坤阳, 靳剑桥, 任雷, 钱志辉, 修豪华, 梁威, 任露泉; 低能耗被动柔性踝足关节假肢, ZL202011023562.X, 授权公告日: 2021.08.27
15. 王坤阳, 靳剑桥, 任雷, 钱志辉, 修豪华, 梁威, 任露泉; 一种基于气压变化的被动助力柔性仿生拉压体踝足关节假肢, ZL202010822961.6, 授权公告日: 2021.06.29
16. 王坤阳, 薛益峰, 任雷, 钱志辉, 修豪华, 梁威, 任露泉; 一种基于人体横弓和液压传动的变刚度假肢脚板, ZL202010741970.2, 授权公告日: 2021.05.18
17. 靳剑桥, 王坤阳, 任雷, 钱志辉, 修豪华, 梁威, 任露泉; 仿生柔性被动足踝关节假肢, ZL202011026426.6, 授权公告日: 2021.08.27
18. 任雷, 卢雪薇, 王坤阳, 钱志辉, 修豪华, 梁威; 一种用于双足行走机器人的节能仿生拉压体髌股关节, ZL202110299957.0, 授权公告日: 2022.03.29
19. 任雷, 曾懿, 王坤阳, 钱志辉, 修豪华, 梁威, 任露泉; 一种球形结构的关节轴角度可调节式多轴踝关节假肢, ZL202011482844.6, 授权公告日: 2021.10.01
20. 任雷, 薛益峰, 王坤阳, 钱志辉, 修豪华, 梁威; 一种具有人体横向足弓特征的变刚度假肢脚板, ZL202010321129.8, 授权公告日: 2021.08.10
21. 任雷, 薛益峰, 王坤阳, 钱志辉, 修豪华, 梁威, 任露泉; 一种具有人体足弓三维曲率特征的刚度梯度变化假肢脚板, ZL202011071231.3, 授权公告日: 2021.07.16
22. 任雷, 靳剑桥, 王坤阳, 钱志辉, 修豪华, 梁威, 任露泉; 一种刚柔耦合仿生被动顺应性踝足假肢, ZL202010822962.0, 授权公告日: 2021.07.06
23. 任雷, 曾懿, 王坤阳, 钱志辉, 修豪华, 梁威, 任露泉; 一种基于固定轴长的关节轴角度可调节式多轴踝关节假肢, ZL202010821143.4, 授权公告日: 2021.07.02
24. 任雷, 曾懿, 王坤阳, 钱志辉, 修豪华, 梁威; 一种关节轴角度可调节式多轴踝关节假肢, ZL202010390157.5, 授权公告日: 2021.07.02
25. 任雷, 靳剑桥, 王坤阳, 钱志辉, 修豪华, 梁威; 基于刚柔耦合的仿生被动柔性低能耗踝足关节假肢, ZL202010080789.1, 授权公告日: 2021.06.25
26. 任露泉, 赵顺, 任雷, 王坤阳, 钱志辉, 修豪华, 梁威; 一种改进型柔性驱动器驱动的软体机器人模块及制作方法, ZL202010440454.6, 申请日: 2020.05.22
27. 任露泉, 赵顺, 任雷, 王坤阳, 钱志辉, 修豪华, 梁威; 一种由柔性驱动器驱动的膝关节, ZL202010846456.5, 申请日: 2020.08.21
主要成就:具备机械智能的仿人行走系统基础理论与关键技术研究

代表性工作一:多学科集成骨骼肌肉健康在体精准测试分析技术体系
代表性工作二:具备机械智能的仿人行走机器人系统
代表性工作三:仿横弓三维变刚度假肢脚板、系列仿生多轴假肢踝关节